- Newbie
")
RTAB-map 3
D vizuelno mapiranje i navigacija : Upotreba algoritma RTAB za integriranje vizije i radara, robot realizuje 3
D vizuelno mapiranje i navigaciju i izbjegavanje prepreka i podržava globalno preseljenje i autonomno pozicioniranje. 1) Materijal od legure aluminija, mekanum kotači za 360 ° svemnični kretanje. Sadržaj predmeta uključuje : Skupštinu ROSMASTER X3, tečajeve za operativne sisteme ROS i OPENCV, dubinu kameru i mapiranje litara i navigacijsko objašnjenje, od jednostavnog do dubinskog učenja mapiranja i navigacije, to je dubinski proces učenja, ali Preporučujemo da postoje programski osnovni korisnici koji koriste ovaj robot komplet. Mediapipe Razvoj : Kroz razvojni okvir Mediapipe, funkcije otkrivanja ruku, otkrivanje položaja, ukupne detekcije, otkrivanje lica, 3
D otkrivanje i prepoznavanje. Prepoznavanje / praćenje u boji : Odaberite određeni prostor u boji na ekranu i pustite da robot prati ovu boju u realnom vremenu. AR PRIZNANJE Oznaka : Podržava dinamičko praćenje i otkrivanje naljepnica QR koda i dobija poze koordinate QR koda u stvarnom vremenu. Izbjegavanje prepreka LIDAR : Lidar otkriva okolno okruženje u stvarnom vremenu i planove apota za izbjegavanje prepreka. Koristeći Python programiranje, Rosmaster X3 može realizirati mapiranje i navigaciju, slijediti ili izbjegavanje, autopilot i otkrivanje položaja ljudskog tijela. Rosmaster X3 je obrazovni robot zasnovan na operativnom sistemu robota sa mekanum kotačem, kompatibilan sa Jetsonom Nano / Xavier NX / TX2 NX i Raspberry PI 4b. Lidar Mapping i navigacija Izbjegavanje : Može realizirati gmappp, hektore, karto, algoritme kartografa mapiranja, planiranje podrške, dinamično izbjegavanje prepreka, navigaciju s jednim točkom i više tačke. Povećanje realnosti : Odaberite odgovarajuću grafiku putem aplikacije, a pustite da se grafika pojavi na papiru za checker tablice putem AR Enhancement tehnologije. KCF za praćenje cilja : Na osnovu korelacije slike KCF Algoritam može odabrati bilo koji objekt na slici i slijediti metu u stvarnom vremenu. RRT istražuje i izgrađuje karte neovisno : Podesite područje istraživanja i koristite algoritam RRT-a za realizaciju autonomnog istraživanja i mapiranja, uštede na mapi i povratak u tačku porijekla. Orbslam2 + Mapiranje octomap : Orb-Slam2 je otvoreni okvir SLAM-a koji podržava monokularne, dvogledne i RGB-D kamere. Odlična hardverska konfiguracija : aluminijumske legure, tijelo od aluminijuma, 360 ° Omni
Directional Mekanum točkovi, opcionalni lidar, visokokvalitetna kamena dubine, opcionalni modul za interakciju glasa, profesionalno dizajniran za širenje.
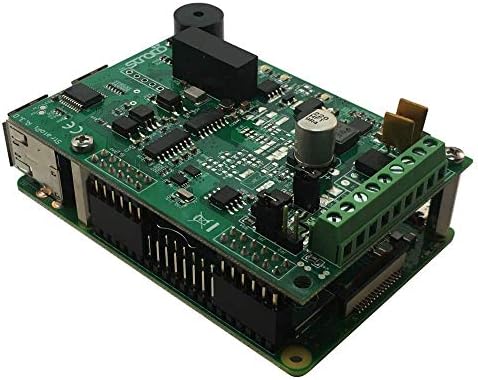
Unaprijed sastavljeni i testirani malina PI 4 B 8 GB sa iono PI ploči, u standardnoj 4 moduli DIN kofer 928 VDC Napajanje, prenapona / obrnuta zaštita od polariteta, 2.2a resetirajuća o
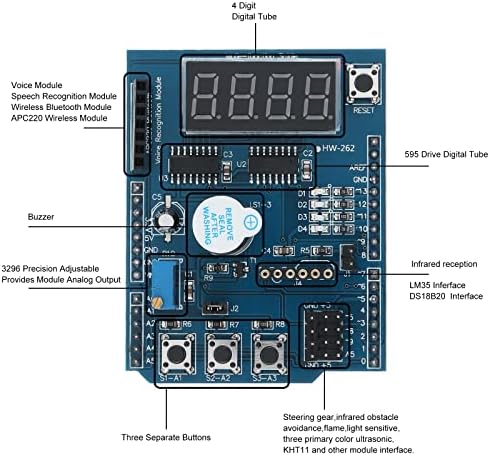
Savršeno kompatibilan sa 2009, UNO, Lenardo, 2560 i drugim kontrolorima Četiri digitalna (koristeći 74 HC595 Pokrajinski provincijski IO učenje SPI), možete napraviti digitalni test za
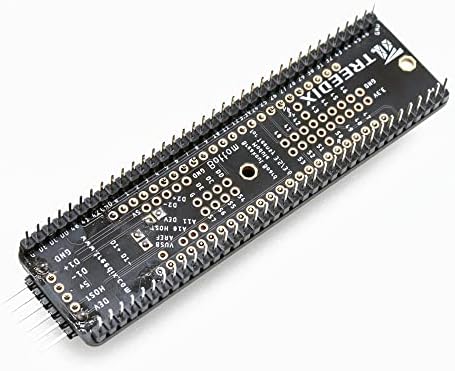
Breakout Board proširuje vezu sa svim procesorskim funkcijama Izbori se dobro izrađen, pozlaćen na obje strane kako bi se spriječilo oksidaciju Svi igle na probijanju su dostupni, Teensy
RP2040 MCU ploča plniska cijena MCUa visoke performanse na slici MCUa na bazi malina PI mikrokontrolera RP2040, kompatibilna je s većinom modula od maline pi pico pico...
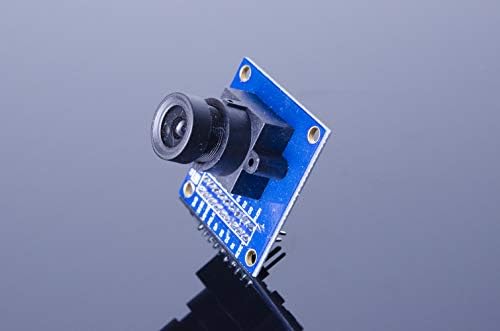
Breakotna ploča 30 × 30 mm za modul kamere OV7670; Sadrži nosač objektiva i sočiva za fokusnu dužinu 3,6 mm Nije uključen FIFO Pogledajte naš drugi popis za OV7670 sa uključenim AL4
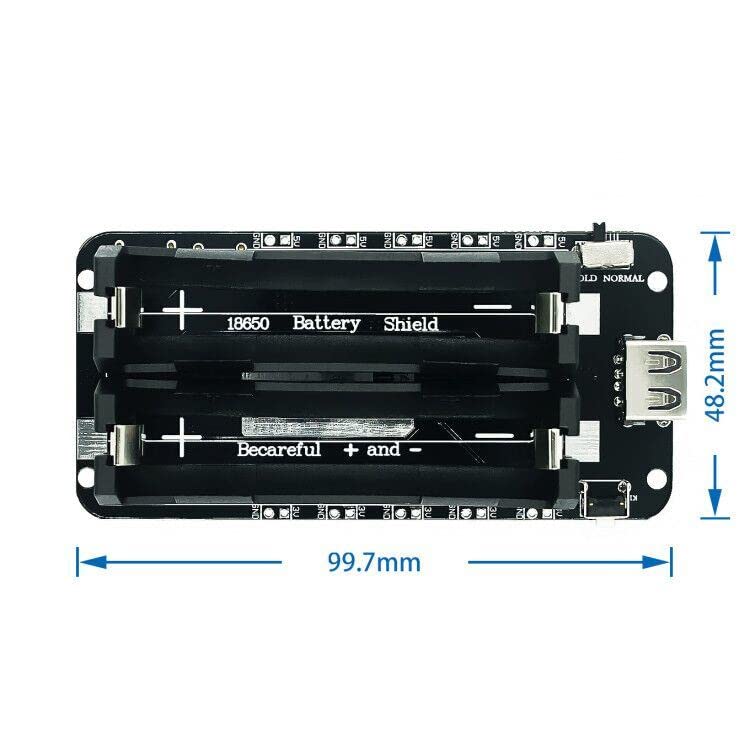
ESP8266 ESP32 Dual 18650 Litijumski baterija Shield V8 5 V 2.2 A 3 V 1 A Mobilna energetska banka Modul za punjenje baterije Micro USB za Arduino ESP8266 ESP32 Dual 18650 Litijumski baterija
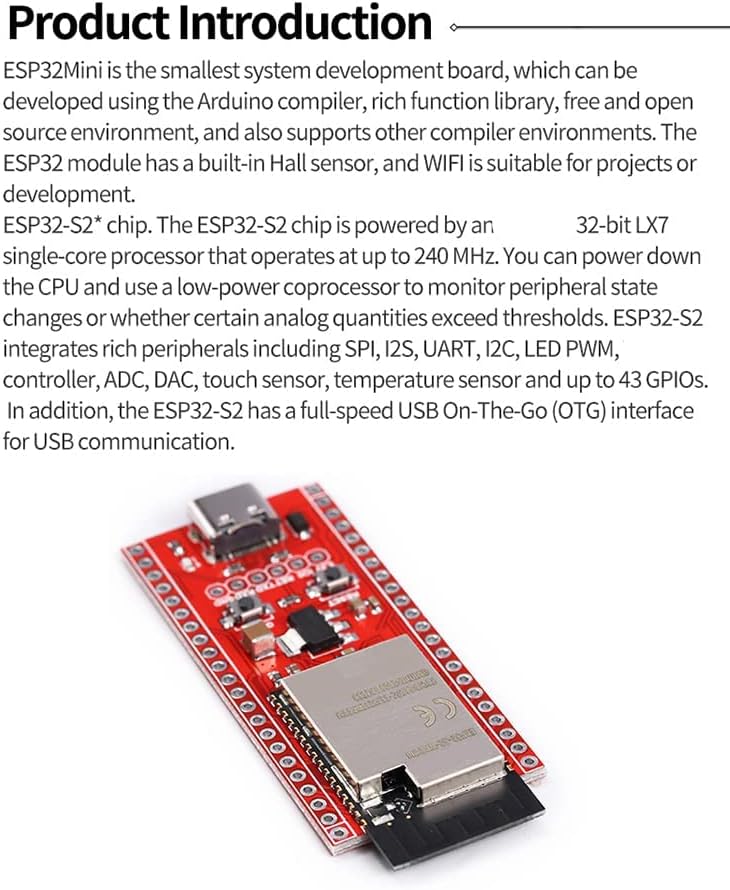
Ne podržava Arduino ili Wed Ugrađeni ESP32S2 Chip, XTEnsa jednojezgreni 32bitni LX7 mikroprocesor, podržava do 240 MHz Clock frekvencije ESP32S2 Integrira bogate periferne uređaje, uklju
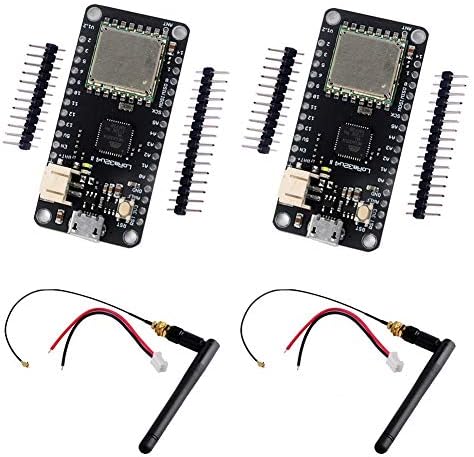
? Link dokumenta HTTPS ( : ) / / TINYURL (DOT) COM / LORA32 U4 II ? Lora32 U4 II je svetla i niska potrošnja ploča zasnovana na Atmega32 U4 i HPD13 915 MHz Lora modulu i USB krugu pun

? 【Proširite Sposobnost Xiao Series Dev Board】 Kompatibilna Xia O ekspanzijska ploča nudi različite sučelja za prenos podataka i funkcionalne periferne uređaje ? Podržite različit

Keramički otpornik na površini (SMD) Fiksni otpornik tankog filma SMDa (100 komada lot) Novo, nikad korišteno dijelove Pakirano u ESD sigurno pakovanje Kvalitet pregledani industrijskim p
★ 100% potpuno nov ★ Korištenje samo dvije igle, kontrolirajte 16 besplatnih PWM izlaza ★ Možete čak i lanac 62 provale za kontrolu do 992 PWM izlaza ★ To je PWM pokretač I2 Ca s

Arduino nano 3.0 ekspanzija Arduino nano 3.0 ekspanzija Glas, displej, resetiranje i I / O ploča za proširenje za Arduino Nano 3.0 4 Digital I / O PINS D4, D5, D6, D7 (Servo tip sa GND
![ADAFRUIT FLEX kabel za maline pi kameru - 300mm / 12 [ADA1648]](/programm/mouse/117_f/104921-adafruit-flex-kabel-za-maline-pi-kameru-300mm-12-ada1648.jpg)
Ovaj kabl će vam dopustiti da zamijenite fleksibilni kabel za razmak od 150 mm iz maline PI kamere (bilo "klasični" ili "noir" tip) ili maline PI zaslona, za različite veličine Odl

Elo 1790 L Proizvod 17inčni LCD (LED pozadinsko osvjetljenje) Sučelje USB i RS232 Touch Controller ELO, 1790 L, 17inčni LCD (LED pozadinsko osvjetljenje), otvoreni okvir, HDMI, VGA i ekra